Computer Vision for Small-Object Perception
Tiny airborne object detection from moving platforms under clutter, camouflage, motion, and occlusion.
PhD Candidate in Computer Science, Missouri University of Science and Technology
Computer Vision · Machine Learning · Multimodal AI · Applied AI Engineering
I develop machine learning methods and applied AI systems for robust visual and multimodal perception under small-object scale, motion, occlusion, missing observations, sensor uncertainty, and domain shift. My dissertation work focuses on UAV-based airborne object detection and tracking, and I am extending these ideas toward GeoAI and biomedical AI.
Expected PhD: July 2026 · Open to assistant professor, postdoctoral research, research scientist, applied scientist, and AI/ML/CV engineering roles starting in 2026.
Tiny airborne object detection from moving platforms under clutter, camouflage, motion, and occlusion.
Temporal modeling, trajectory continuity, missing-observation recovery, and multi-object association.
Learning from visual and multimodal signals under uncertainty, sensor degradation, missing inputs, and domain shift.
Robust sensing pipelines using heterogeneous LiDAR streams, temporal accumulation, clustering, tracking, and uncertainty-aware fusion for UAV-scale object perception.
Reproducible, testable, and deployment-aware AI pipelines for perception, evaluation, visualization, real-world data, and practical systems such as KeepScoreAI.
Remote sensing generalization and MRI/radiogenomic AI as extensions of robust multimodal learning.
Representative systems from my UAV-based perception and tracking research.
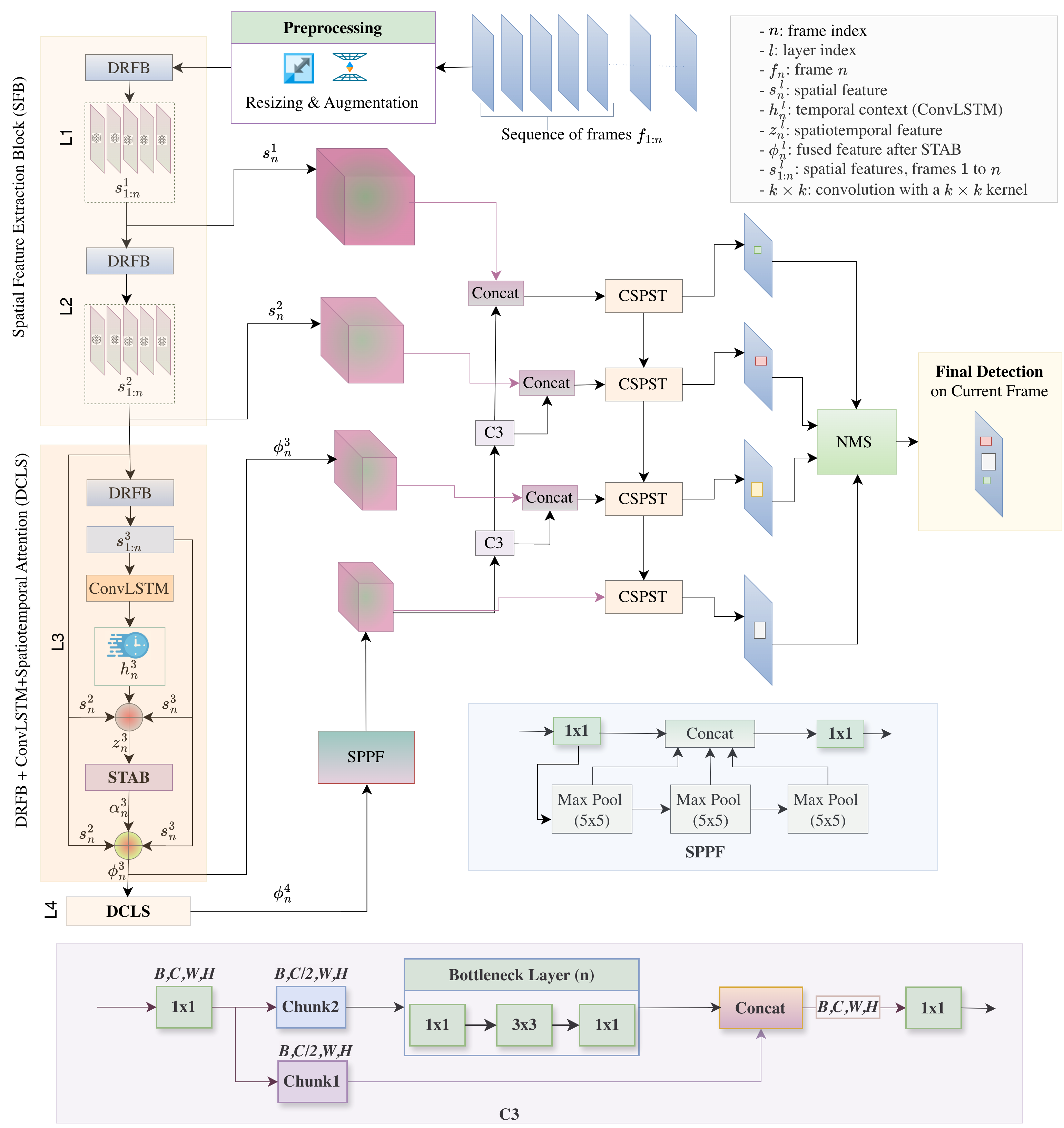
Spatiotemporal attention for detecting weak airborne targets from moving drones under clutter, motion, and occlusion.
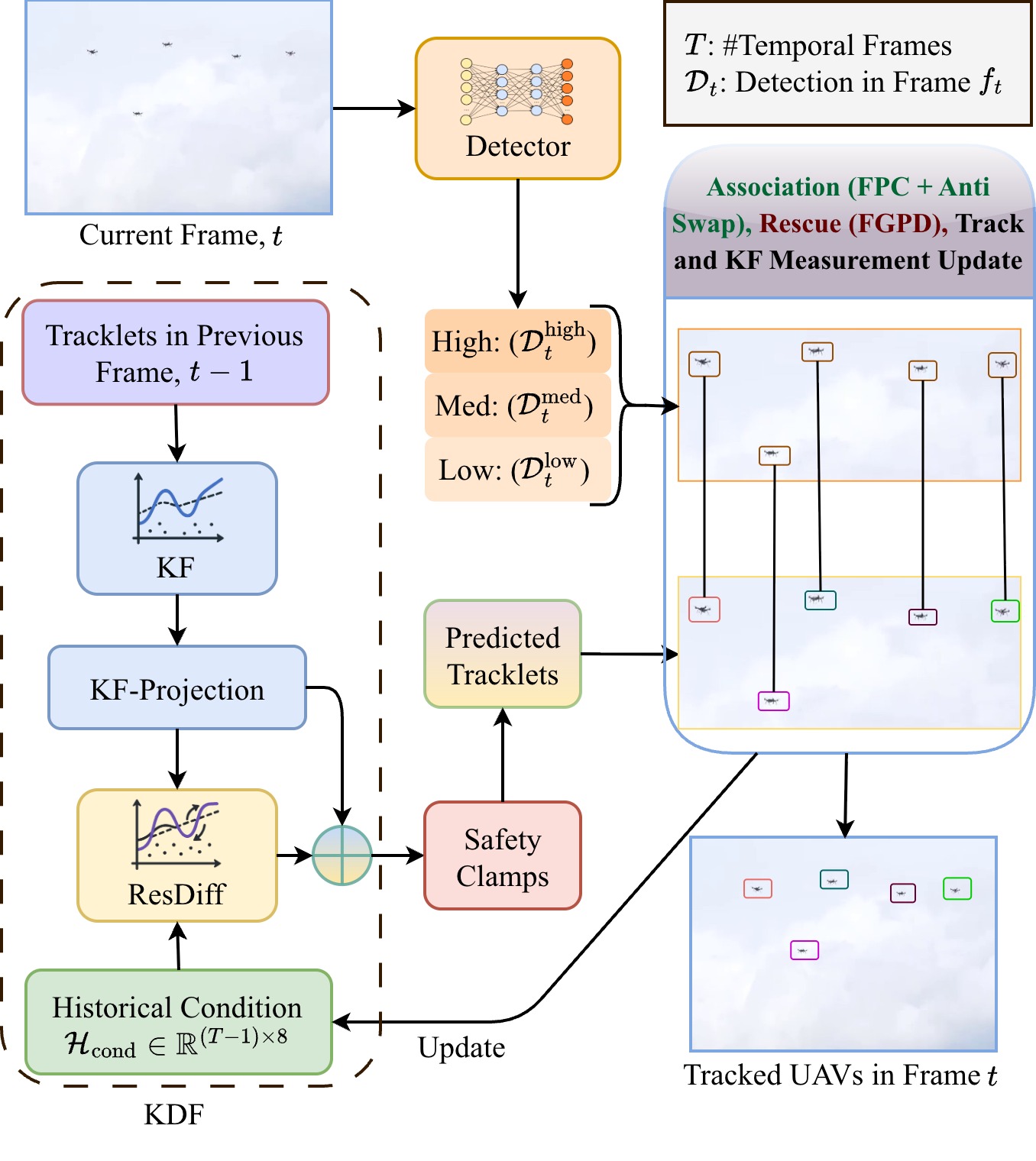
Formation-aware multi-object tracking with Kalman residual refinement, conservative recovery, and missing-observation handling.
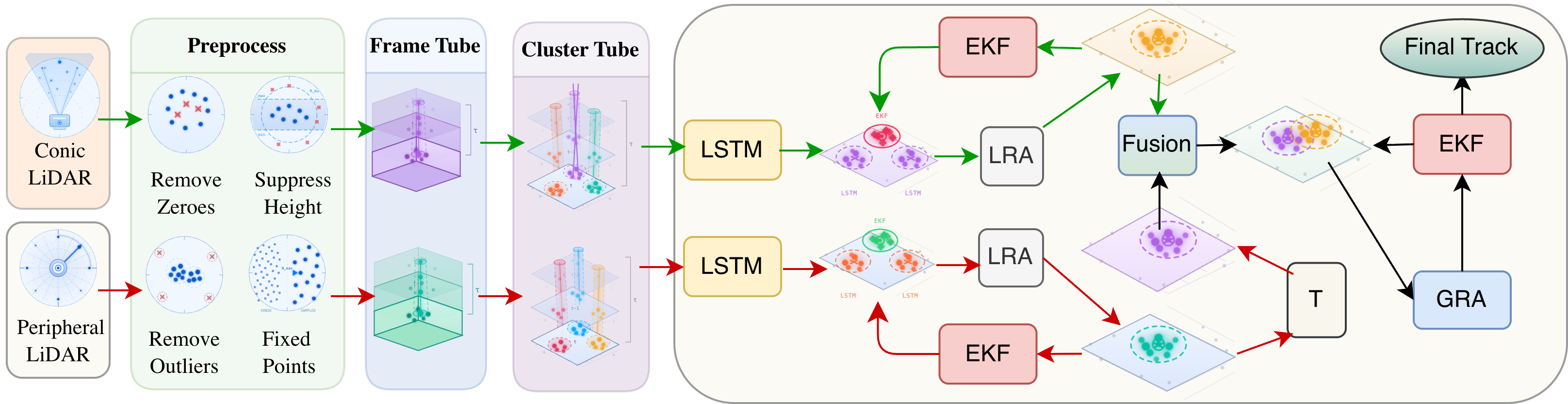
Heterogeneous LiDAR-based perception pipeline for sparse point clouds, temporal accumulation, candidate clustering, and reliability-aware fusion.
Tiny airborne object detection from moving drones. ACM TSAS 2026.
Formation-aware UAV swarm tracking with conservative recovery. IEEE ICPR 2026 accepted.
Heterogeneous LiDAR-based UAV perception with temporal point-cloud accumulation and reliability-aware fusion. Ongoing research / applied AI engineering project.
Applied AI engineering project for a practical AI-assisted scorekeeping workflow. Applied AI engineering project.
Vision-based UAV swarm detection and tracking using formation constraints. IEEE MDM 2025.
Dataset and augmentation work for UAV-based detection and tracking. IEEE AIPR 2023.
Biomedical AI extension on MRI-based radiogenomic classification. Pathways 2026 Top 3 Best Poster.
Teaching is an important part of my academic profile. I value clear explanation, reproducible implementation, and helping students connect computer science theory with working AI systems.
I welcome collaboration and opportunities in computer vision, machine learning, multimodal AI, applied AI engineering, GeoAI, biomedical imaging, and reliable AI.